
Most robots today rely on simple grippers and separate wrist joints to move objects. But those wrists are bulky and often sit far away from the object being held, which makes movements clumsy, inefficient, and less adaptable for delicate tasks. The Sphinx hand, developed by the Yale GRAB Lab, takes a different approach: building wrist-like motion directly into the fingers. This allows the hand to spin and tilt objects smoothly around a fixed point, without the awkward arm movements traditional robots require.
“In robotics, anytime a robot wants to interact with the world, it has to grasp something,” Vatsal Patel (SEAS ’26), the lead author of a recent paper on the project, said. “How you design that gripper, how you design that hand, is what makes a robot capable of doing something well—or not.”
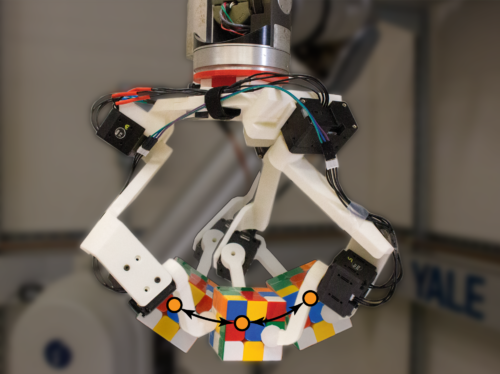
In lab trials, the Sphinx hand handled a wide range of everyday items, including bottles, light bulbs, and even puzzle cubes. It was able to rotate objects up to eighty degrees with surprising accuracy, all without advanced sensors or complicated control systems. The design is being released open-source through Yale’s OpenHand Project, meaning other researchers and companies can build on the technology. Future versions may add touch sensors to help with fragile or slippery objects, like food or glassware. By blending gripping and rotation into one sleek mechanism, the Sphinx hand could help robots improve their dexterity and articulation, ultimately performing more useful tasks in homes, workplaces, and beyond.