
Courtesy of Guorui Li.
The intense pressures of the deep ocean cause it to remain Earth’s largest unexplored territory. Currently, mechatronic machines with rigid vessels and pressure-compensation systems are commonly used to explore these high-pressure terrains. However, to protect against extreme pressures, these machines are often bulky and inflexible, which make them highly susceptible to structural failures. Inspired by the hadal snailfish, a deep-sea creature native to the Northwest Pacific Ocean, a Chinese research team from Zhejiang University developed the first untethered self-powered soft robot that is fully functional in the deepest parts of the ocean.
Structural failure under high pressures remains a prevalent challenge when constructing deep-sea exploration systems. In order to combat this issue, underwater soft body robots inspired by soft-bodied sea creatures were developed. These robots are designed with soft actuators, or components responsible for mechanical motion, and are structurally flexible for efficient swim performance, often utilizing propulsive movements like flapping or jetting. However, these robots are still incapable of overcoming extreme hydrostatic pressures without bulky vessels. To solve this issue, the researchers incorporated bodily features of the hadal snailfish, such as its distributed skull and flapping pectoral fins.
The snailfish’s distributed skull led the researchers to a decentralized design in the robot’s soft body. They found that electronic components densely packed onto the same printed circuit board (PCB) often led to pressure-induced shear stresses at the interfaces between components. This often resulted in pressure test failures. However, they were able to lower the average shear stress when direct contact between components were decreased and distances between microchips were increased through wire connections and separations into several smaller PCBs. Pressure tests comparing the centralized and decentralized designs confirmed that there was greater pressure resilience when adopting the latter design.
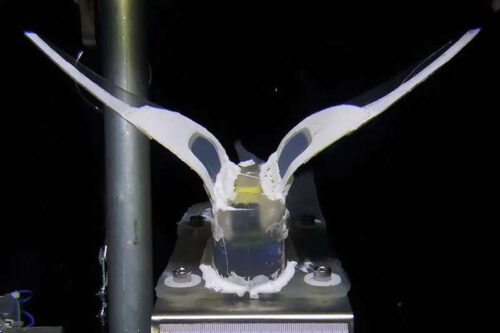
The researchers used soft actuators to model their robot after the snailfish’s joints and fins. Mirroring the snailfish’s thin pectoral fins, they incorporated silicone film flapping fins that were supported by elastic frames and stiff leading edges. They also included dielectric elastomer muscles between the frames and the fins that were similar to the snailfish’s joint muscles. When in action, the muscles flapped the robot’s fins, propelling it forward and allowing it to swim. The electronics were encapsulated in a soft silicone matrix, which, when combined with the robot’s decentralized system, resulted in a low-density design that was beneficial for deep-sea swimming.
Several field tests and experiments in a pressure chamber confirmed the robot’s excellent swimming ability and pressure tolerance. The robot was fully operative in the Mariana Trench at a depth of 10,900 meters and in the South China Sea at a depth of 3,224 meters. The last known robot capable of similar depths in the Mariana Trench was Nereus, which in 2009, dove to a depth of 10,902 meters. Swimming speeds and performances were tested in a pressure chamber by attaching the robot to a rotatable rod and allowing it to swim. Free-swimming ability was further tested in a deep lake by measuring the robot’s speeds at various depths. Results from these tests verified its robustness for field explorations.
The researchers have shown that soft robotics may be a more effective avenue for deep sea studies. In the future, they hope to focus on developing new machinery that can enhance efficiency, intelligence, versatility, and maneuverability.
Sources:
Li, G., Chen, X., Zhou, F., Liang, Y., Xiao, Y., Cao, X., Zhang, Z., Zhang, M., Wu, B., Yin, S., Xu, Y., Fan, H., Chen, Z., Song, W., Yang, W., Pan, B., Hou, J., Zou, W., He, S., … Yang, W. (2021). Self-powered soft robot in the Mariana Trench. Nature, 591(7848), 66–71. https://doi.org/10.1038/s41586-020-03153-z